The Domino Robot did not just magically appear into existence one day fully functional. It took over two years of design, testing, failure, and iteration to get to the final result. It’s often easy focus on only the end product and forget all about the difficult, meandering engineering journey it took to get there. So, I want to take you behind the scenes into what this journey looked like for me while designing the Domino Robot.
The hardware of ‘Dominator’ the Domino Robot was custom designed and the final version has a lot of parts to it. This article goes over the various hardware components of the robot in detail and explains what each piece does.
The software for the Domino Robot was designed from the ground up and is spread across three different computers. This article goes over all of the technical details about the various software modules, what they do, and how they work together to make the Domino Robot function.
One of the core software components needed for the Domino Robot was a method of generating a trajectory for the robot to follow. This post details the trajectory generation system I designed, including the mathematical derivation, algorithm, and results.
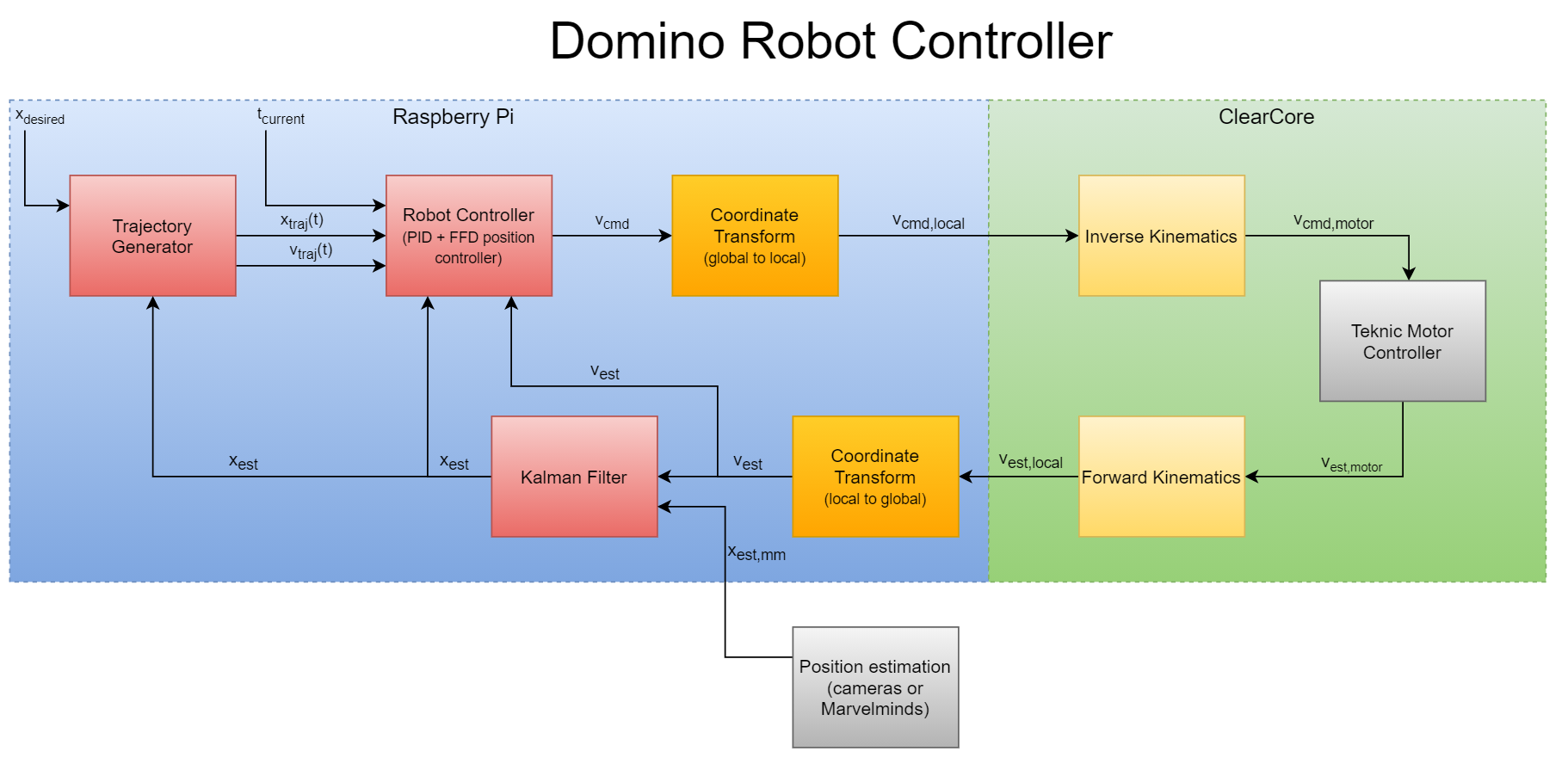
Since the Domino Robot and all its software was custom designed, I needed to design a custom control system from the ground up. This post showcases the full control loop and discusses details about each of the components of the loop.